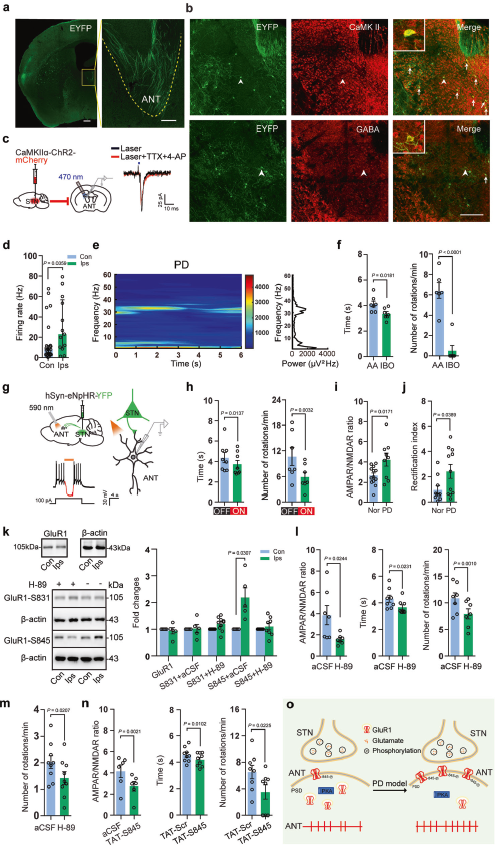
该研究以“STN–ANT plasticity is crucial for the motor control in Parkinson’s disease model”为题,于2021年6月在《Signal Transduction and Targeted Therapy》在线发表。该研究发现STN-ANT环路的突触可塑性控制着PD模型啮齿动物的运动行为。这条新发现的STN-ANT环路可能是一种将运动信号从基底神经节中的STN传递到扣带皮层的环路,并作用于感觉-运动整合和突触可塑性,参与了帕金森病模型运动缺陷的调节。



 地址:上海市徐汇区医学院路138号
地址:上海市徐汇区医学院路138号  邮编:200032
邮编:200032  电话/传真:021-54237056
电话/传真:021-54237056  邮箱:itbr@fudan.edu.cn
邮箱:itbr@fudan.edu.cn 
